MPU6050 |
您所在的位置:网站首页 › mpu6050 dmp详解 › MPU6050 |
MPU6050
|
一.姿态检测
1.姿态是载体坐标系与地理坐标系的转换关系。
地球坐标系:地球球心为原点,Z沿地球自转方向,x和y轴在赤道平面内。 地理坐标系:原点在地球表面,Z轴垂直于地面朝天,X,Y方向是相切于地球的经纬线。 载体坐标系:以运载体的质心为原点,一般根据运载体自身结构方向构成坐标系。 偏航角:绕载体Z轴旋转后,Y轴与北轴的夹角。横滚角:绕载体Y轴旋转后,X轴与东轴的夹角。俯仰角:绕载体X轴旋转后,Z轴与天轴的夹角。 2.相关的传感器(1)陀螺仪(角度检测器):可以检测物体绕坐标轴转动的角速度。将角速度对时间积分就可以计算出旋转的角度。在四轴飞行器,两轮平衡小车等项目中经常用到。 陀螺仪的缺点:测量角度时使用积分,会存在积分误差。这是由于积分时间比较大,误差也比较大。不断提高采样频率,就可以减小积分时间,减少误差。还有就是器件本身的误差。 (2)加速度传感器:检测角度。由于陀螺仪测量角度在长时间测量时会产生误差,又引入了检测倾角的传感器。加速度传感器可以检测俯仰角和横滚角,无法检测偏航角。由加速度来计算角度。 加速度传感器的缺点:无法区分重力加速度和外力加速度,在震动情况下,传感器数据会有非常大的变化,难以反映重力实际值。 (3)磁场检测:弥补加速度传感器无法检测偏航角的问题,加入磁场检测传感器。可以检测各个方向上的磁场大小,可以计算出偏航角。缺陷就是受到外部磁场的干扰。 (4)GPS检测:直接检测载体在地球上的坐标,只有在大范围移动时才有效。 3.姿态融合与四元数陀螺仪和加速度传感器都可以测量角度,但是各有缺陷。陀螺仪在静止状态下会产生难以消除的误差,加速度传感器在运动时存在缺陷,两者刚好互补。为了较少数据的误差,我们同时使用这两个传感器,并且设计一个滤波算法。当物体处于静止状态时,增大加速度传感器的数据权重;当处于运动状态时,加大陀螺仪的数据权重。 同理,在检测偏航角时,在静止状态下增大磁场检测的权重,运动状态下增大陀螺仪和GPS的权重。 这种采用多种传感器来检测姿态的算法称为姿态融合。 在姿态融合解算时常常使用四元数来表示姿态。四元数是姿态角的另一种表示方式,它由三个实数和一个虚数组成。在数据处理时使用四元数,处理完之后再转换成欧拉角。 二.MPU6050MPU6050是六轴传感器,可以同时检测三轴加速度,三轴角速度的运动数据和温度数据。 可以使用STM32控制器将这些数据都读取出来之后进行姿态融合解算,求出传感器当前的偏航角,横滚角,俯仰角。如果使用传感器内部的DMP单元进行解算,它可以直接对采样得到的加速度及角速度进行姿态解算,解算得到的结果再输出给STM32,STM32不需要自己解算。 DMP模块(Digital Motion Processor数字运动处理器),可对传感器数据进行滤波,融合处理,它直接通过I2C接口向主控器输出姿态结算后的姿态数据。非常适合对姿态控制实时要求比较高的领域。常应用于手机,智能手环,四轴飞行器等的姿态检测。
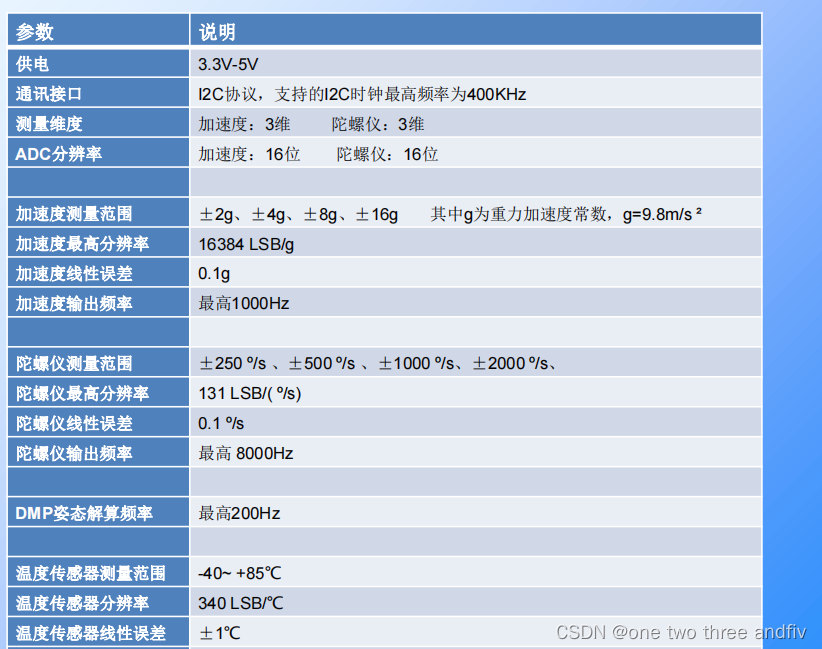
传感器分辨率是如何计算出来的?与ADC分辨率的关系? 传感器的最高分辨率一定是最小量程下,使用ADC分辨率计算出来的。ADC分辨率表示有多少个最小单位。传感器分辨率=ADC分辨率/最小量程。比如:ADC分辨率为12位,最小量程为+-2g,那么加速度传感器的最高分辨率就是2^12/4=16384LSB/g。 三.MPU6050模块
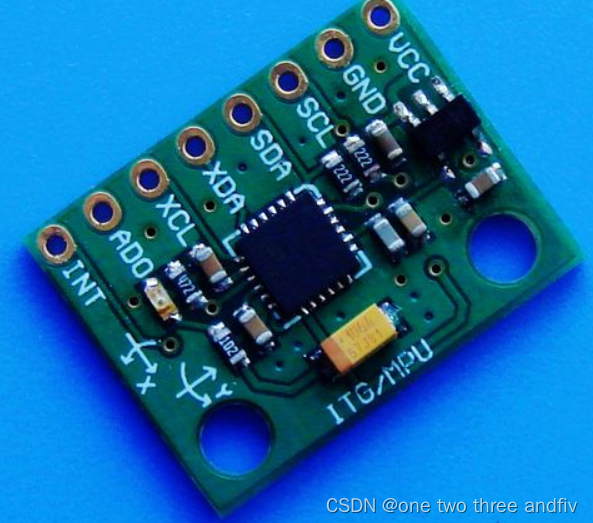
MPU6050模块内部有一个LDO,这决定了MPU6050也可以使用5V的电源输入。一般情况下是3.3V。那么我们可以看到有SCL,SDA(已经连接了上拉电阻,可以直接导线连接)是连接I2C接口的,使用硬件I2C则需要查表确定。XDA,XCL是MPU6050模块提供的第二I2C,一般用来和其他I2C传感器通讯,但实际上效率低,性能较差(使用时要注意连接上拉电阻)。除此之外,还有AD0和INT引脚。AD0决定了MPU6050的从机地址。当AD0接地或者悬空时,地址为0X68(7位地址,最后一位表示读写),接VCC时,地址是0X69(7位地址)。INT是中断输出引脚,当MPU6050有新数据时,通过INT引脚通知主控,一般悬空或者接地。 MPU6050内部有16位的ADC(数模转换),因此MPU6050传输出去的数据是经过模数转换的数字信息,发送到STM32上时,是不再需要STM32上的ADC进行模数转换了。所以,并不是所有的传感器传输的数据发送到STM32都需要模数转换,要看清楚传感器模块上是否已经具备了ADC。 链接了解更多: 2. MPU6050模块 — [野火]STM32模块例程介绍 文档 (embedfire.com) 四.写代码 1.MPU6050获得原始数据I2C初始化(软件模拟)--->MPU6050初始化--->MPU6050_I2C读写函数。 在这个阶段,没有DMP解算,获得的数据只是MPU6050的原始数据,想要获得欧拉角,必须要使用DMP模块。 2.使用DMP解算,获得欧拉角这一部分的代码较为庞大复杂,主要依靠代码移植来完成。需要使用官方提供的MPL软件库。使用这个软件库需要为它提供I2C读写接口,定时服务以及MPU6050的数据更新标志。如果需要把欧拉角输出到上位机,那么还需要提供串口接口。 MPL库的I2C读写接口的格式是固定的。定时服务同样在inv_mpu.c文件中给出了接口格式。与第一步写的I2C读写函数一致的话,直接使用宏定义就可以替换。 MPL代码库将调试输出函数放到了log_stm32.c文件中,可以为这些函数提供串口输出接口,一边把信息输出到上位机。 MPL代码使用了MPU6050的INT中断信号,为此,需要提供中断接口在.it.c文件中。中断里调用了MPL的某一变量,可以通知MPL库有新的数据。 具体的DMP解算过程,不作详细说明。 程序流程对比: 1.MPU6050在软件模拟I2C时,STM32读取原始数据: 初始化GPIO,I2C,MPU6050--->I2C读写函数--->判断传感器ID是否正确--->使用定时器,一定时间之后,循环读取MPU6050的原始数据 2.MPU6050在软件模拟I2C时,使用DMP模块获得欧拉角: 在1的基础上,需要提供MPL库的各种接口(接口函数需要与其规定的格式相同),设置运算参数,检查是否有数据更新,对数据进行处理。最后,调用read_from_mpl函数向主机输出解算数据。 MPU6050初始化: MPU6050的初始化主要是通过I2C给MPU6050的寄存器发送数据,设置它的参数。 void MPU6050_Init(void) { int i=0,j=0; for(j=0;j |
【本文地址】
今日新闻 |
推荐新闻 |